はじめに
ESP32を搭載したロボットカーをMicroPythonプログラムで制御するというものを作成していきたいと思います。
ここでは、そのベースとなるロボットカーをつくっていきます。
準備
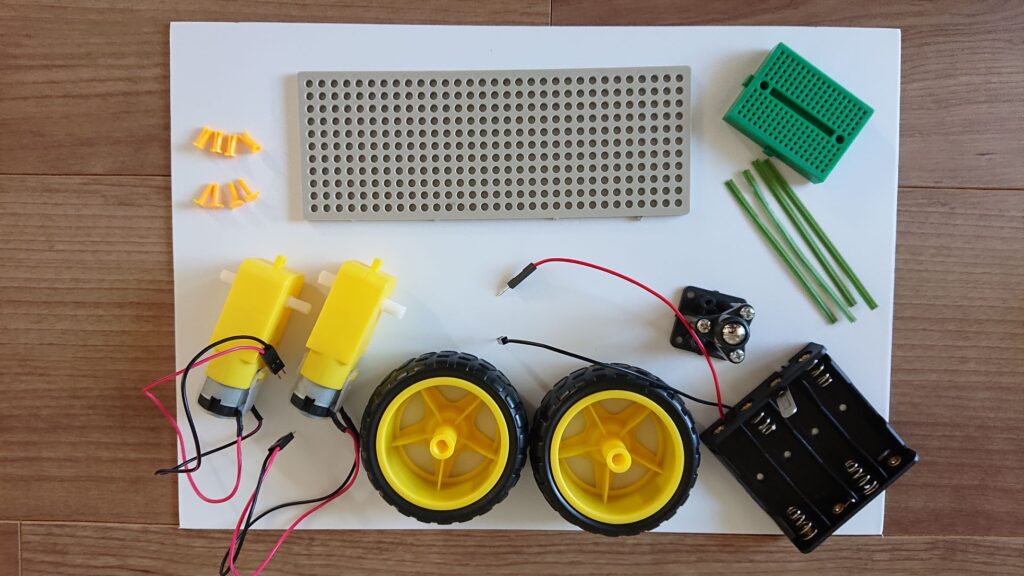
使用するパーツになります。
- ユニバーサルボード
- ミニブレッドボード
- モーター(2個)
- タイヤ(2個)
- ボールタイヤ(1個)
- 電池ホルダー(単三電池4本タイプ1個)
- 固定ピン・固定ピン受け(各4個)
- 固定ワイヤー(4本)
- 配線用線材
固定ピン・固定ピン受けは、ユニバーサルボードに付属してるものを使います。
固定ワイヤーは100円ショップなどで売っているビニルタイです。モーターをユニバーサルボードに取り付ける時に使います。
モーターと電池ホルダーには、半田で配線をつけておきます。先端は、ブレッドボードに接続できるようにQIコネクタにしました。








組み立て
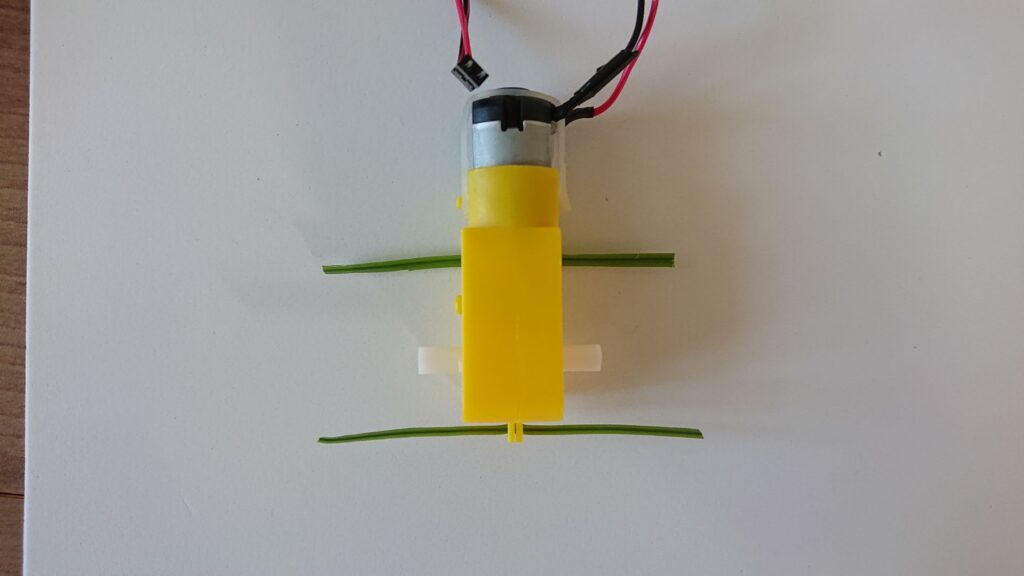
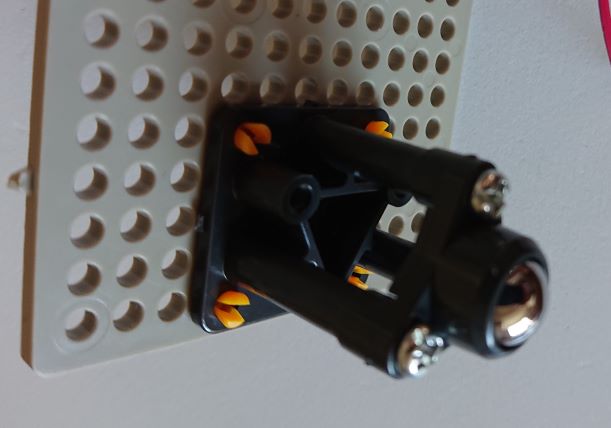
固定ワイヤーをモータ部分の穴に通します。
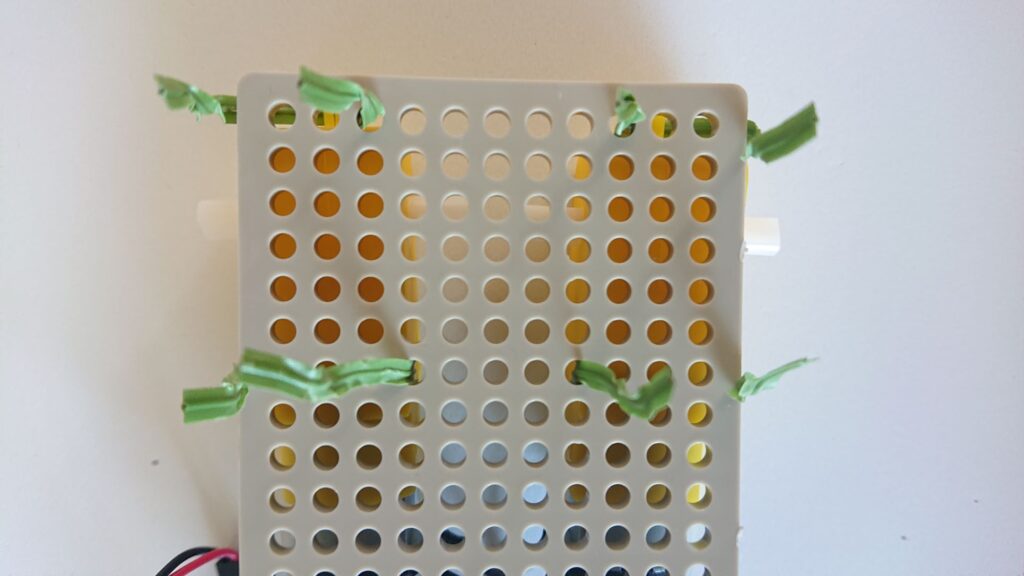
その状態で固定ワイヤーをユニバーサルボードの穴に通していきます。
ユニバーサルボードの穴にワイヤーを通したらそのワイヤーをねじってモーターをボードに固定します。ボードとモーター回転軸が垂直になるようにして、緩まないようにしっかりと固定します。

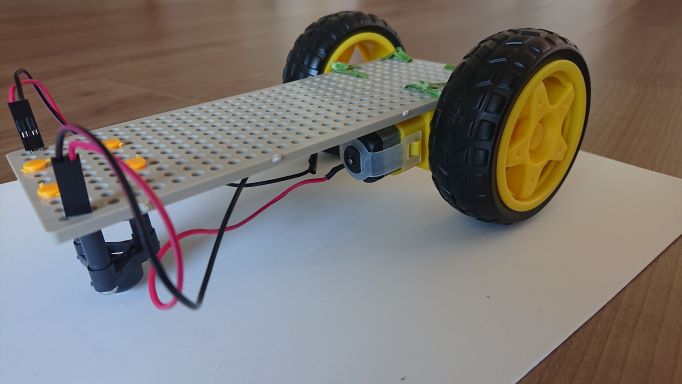
取り付けたモーターの回転軸に後輪となるタイヤを取り付けます。左右の軸にタイヤを差し込むだけです。後輪タイヤを取り付けたら前輪を取り付けていきます。前輪にはボールタイヤを使っています。
ボールタイヤは、ボールタイヤキットに付属している説明書に従って組み立てておきます。ボールタイヤは、高さが調整できる設計になっているので、ここでは、一番高い設定にしています。
ボールタイヤの取り付けは、ユニバーサルボードに付属している固定ピンと固定ピン受けを使っています。ボードの穴に固定ピン受けを入れてその中に固定ピンを押し込むことでボールタイヤを取り付けることができます。

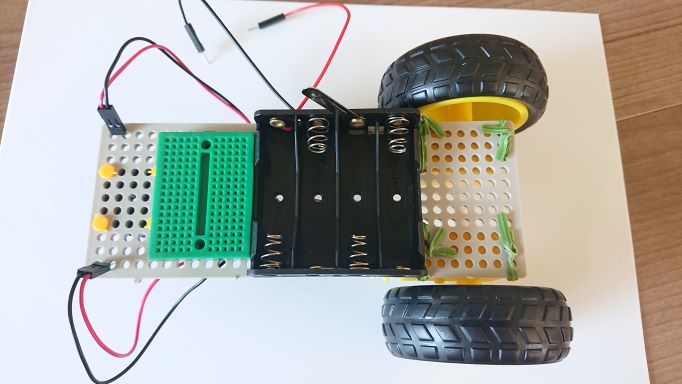
最後に電池ホルダーとブレッドボードを取り付けます。
ブレッドボードには両面テープが付いているので、シールをはがしてユニバーサルボードに付けます。
電池ホルダーには、市販の両面テープを付けて同じように取り付けます。
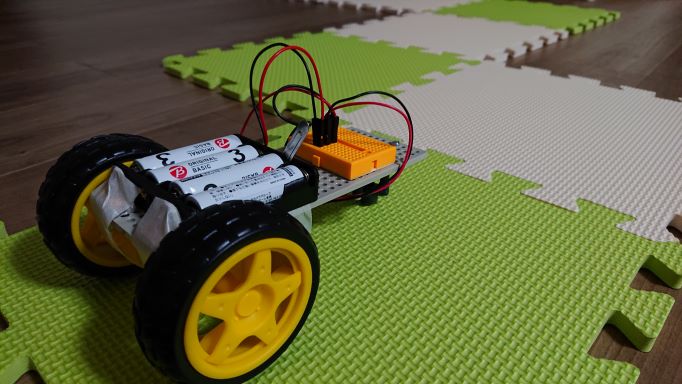
これで完成です。
動作確認

電池の配線と左右のモーターの配線の組み合わせによって、回転が変わります。
左右のタイヤそれぞれで前方向への回転する配線の組み合わせ、後方向へ回転する組み合わせがあります。その配線にしたときに前進、後進していきます。当然の結果ですが…
一方のタイヤを停止してもう一方のタイヤを回転させることで、旋回することができます。
これによって、方向転換ができます。
おわりに
ここでは、ロボットカーをつくって動作確認するところまで行いました。
タイヤの固定方法などは工夫の余地があるかと思います。
動作確認では、配線を手動で切り替えることにより前進、後進、左右の旋回というように動作を変えることができました。
次回は、これをプログラムにより動作を切り替えられるようにして、ロボットカーを制御していこうと思います。


コメント